Cynnyrch




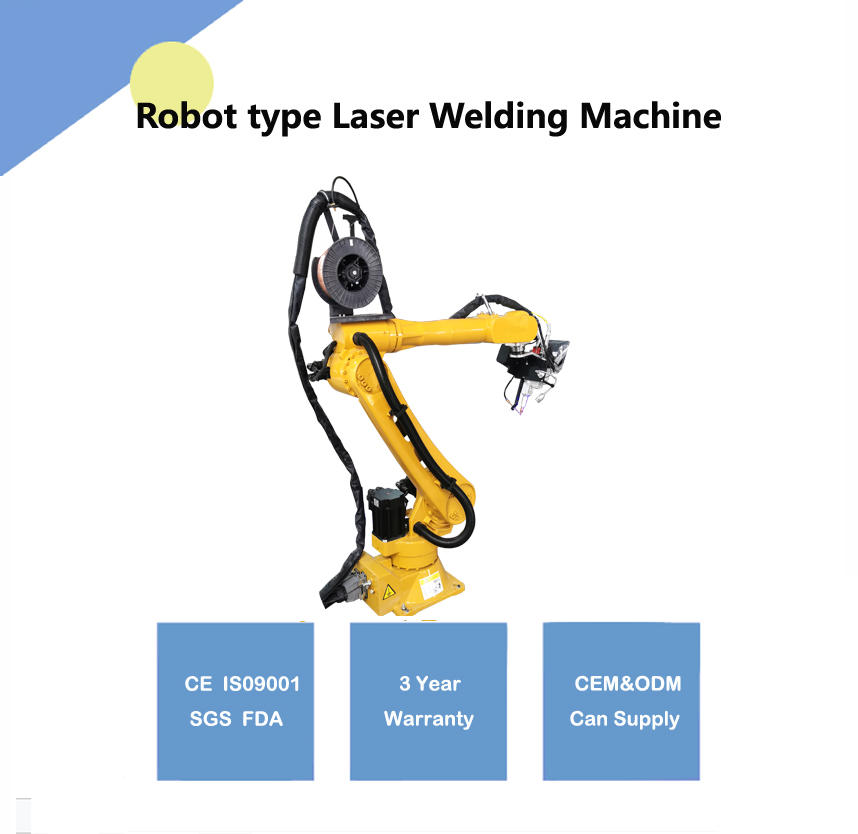
Peiriant Weldio Laser math robot
Arddangosfa Cynnyrch
Paramedr technegol
| Robot Chwe Echel | Tuling | Cydrannau Craidd | Ffynhonnell Laser |
| Defnydd | Metel Weldio | Pŵer Allbwn Uchaf | 2000W |
| Deunydd Cymwysadwy | Metel | CNC Neu Beidio | Ie |
| Modd Oeri | Oeri Dŵr | Systemau Trydanol a Niwmatig | Schneider |
| Tonfedd | 1090Nm | Pŵer Laser | 1000w/ 1500w/ 2000w |
| Pwysau (Kg) | 600 Kg | Ardystiad | Ce, ISO9001 |
| Cydrannau Craidd | Ffynhonnell Laser Ffibr, Ffibr, Pen Weldio Laser Trin | Pwyntiau Gwerthu Allweddol | Cywirdeb Uchel |
| Swyddogaeth | Weldio Laser Rhan Metel | Hyd y Ffibr | ≥10m |
| Diwydiannau Cymwys | Gwestai, Siopau Dillad, Siopau Deunyddiau Adeiladu | Cydrannau Craidd | Ffynhonnell Laser |
| Modd Gweithredu | Pwlsiedig | Gwasanaeth Ar ôl Gwarant | Cymorth Ar-lein |
| Diamedr y Smotyn Ffocws | 50μm | Y Gorchudd Uchaf | 1730mm |
| Archwiliad Allanol Fideo | Wedi'i ddarparu | Fformat Graffig a Gefnogir | AI, Plt, Dxf, Dwg, Dxp |
| Man Tarddiad | Jinan, Talaith Shandong | Amser Gwarant | 3 Blynedd |
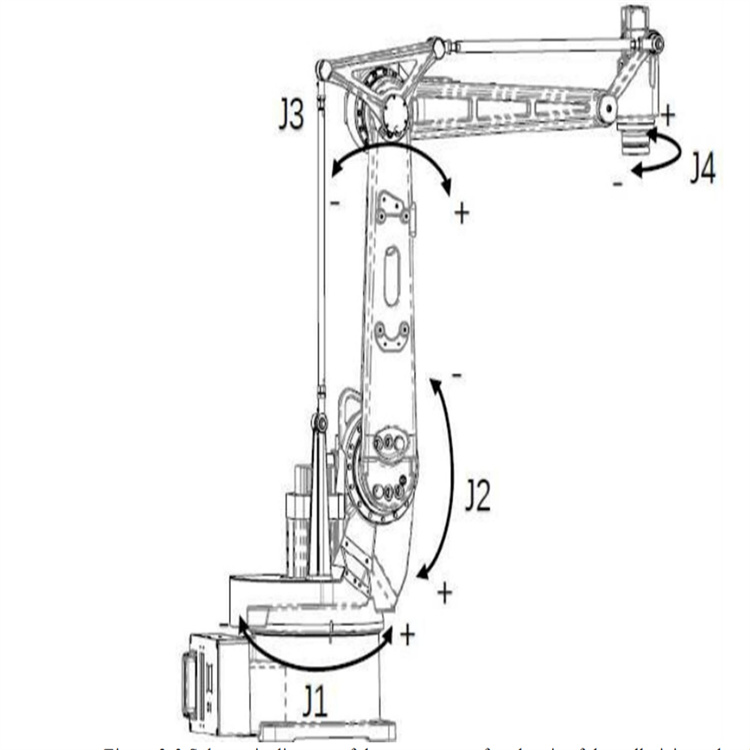
Braich robot
Gall echelin y robot fod yn echelin gylchdro neu'n echelin gyfieithu, a phennir modd gweithredu'r echelin gan y strwythur mecanyddol. Mae echelin y robot wedi'i rhannu'n echelin symud corff y robot a'r echelin allanol. Mae'r siafft allanol wedi'i rhannu'n fwrdd llithro a gosodwr. Oni nodir yn wahanol, mae echelin y robot yn cyfeirio at echelin symud corff y robot.
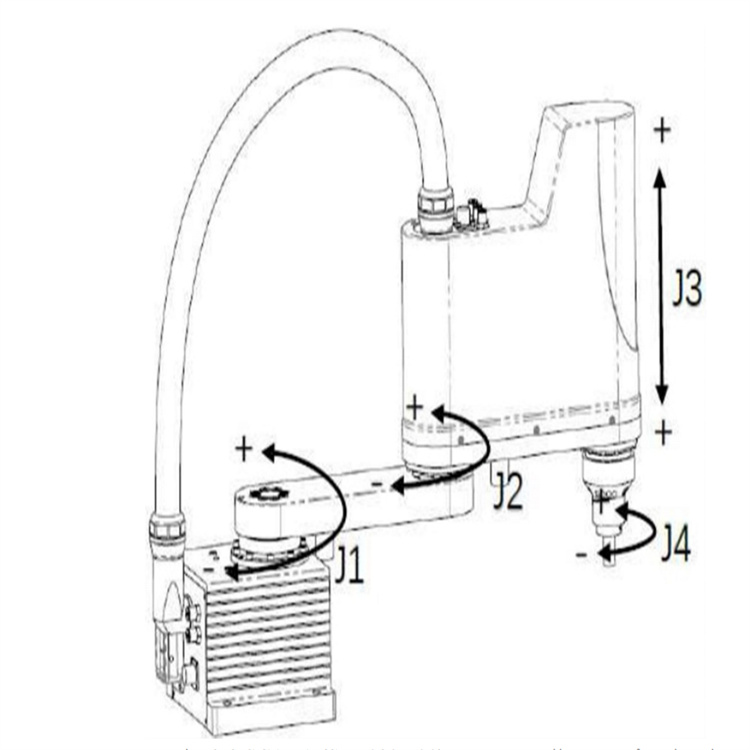
Mae robotiaid Turing wedi'u rhannu'n dri math o robotiaid diwydiannol:
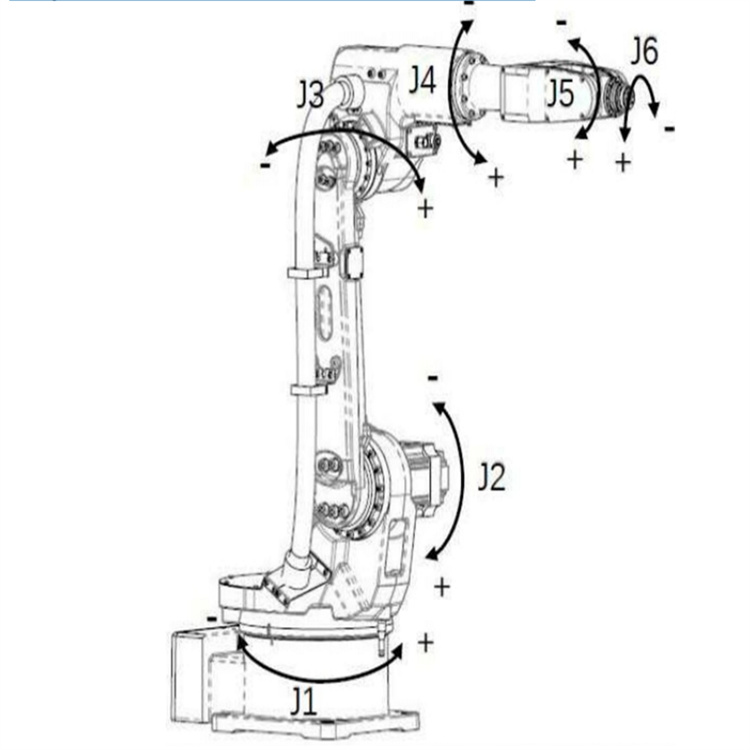
Robot chwe echel diwydiannol: gan gynnwys chwe echel cylchdro
SCARA: yn cynnwys tair echelin gylchdro ac un echelin gyfieithu
Triniwr paledi: gan gynnwys pedair siafft gylchdroi Dangosir symudiad cymal y robot yn y ffigur.
Cymhwyso peiriant weldio robot
1. Maes Gweithgynhyrchu Peiriannau
Gyda dwysáu tasgau weldio yn y diwydiant gweithgynhyrchu peiriannau, mae gan y llawdriniaeth weldio amodau gwaith gwael yn eu hanfod ac ymbelydredd gwres mawr, sy'n alwedigaeth beryglus iawn. Mae yna hefyd lawer o offer ar raddfa fawr mewn gweithgynhyrchu peiriannau, sydd hefyd yn cynyddu anhawster weldio. , Mae robot weldio yn offer mecanyddol awtomatig sy'n ymwneud â gwaith weldio, sy'n rhyddhau dwyster llafur gweithwyr ac yn helpu i wella lefel awtomeiddio ym maes gweithgynhyrchu peiriannau.
2. Rhannau ceir a auto:
Yn ystod y blynyddoedd diwethaf, er mwyn diwallu anghenion y cyhoedd, mae'r diwydiant modurol wedi dangos datblygiad amrywiol. Ni all weldio traddodiadol fodloni gofynion weldio uchel gweithgynhyrchu ceir a rhannau auto. Mae'r sêm weldio yn brydferth ac yn gadarn. Mewn llawer o weithdai cynhyrchu ceir modern, mae llinellau cydosod robotiaid weldio wedi'u ffurfio.
3. Offer electronig:
Mae gan y maes offer electronig ofynion cymharol uchel ar gyfer ansawdd weldio. Gyda'r galw cynyddol am offer electronig yn y gymdeithas, mae offer electronig hefyd yn wynebu heriau difrifol wrth ddatblygu'n gyflym. Gall robotiaid weldio sefydlogi ansawdd weldio wrth sicrhau effeithlonrwydd cynhyrchu. Mae weldio manwl gywir yr offer dair i bedair gwaith yn uwch na weldio llafur llaw.
4. Awyrofod:
Yn strwythur yr awyren, mae bron i 1,000 o gydrannau weldio corff yr awyren, ac mae bron i 10,000 o rannau'n gysylltiedig. Mae'r rhan fwyaf o gydrannau dwyn llwyth pwysig yr awyren yn defnyddio cydrannau wedi'u weldio. Mae corff yr awyren dan bwysau mawr yn ystod yr hediad, felly mae'r gofynion weldio yn gymharol llym, a gall y robot weldio osod y paramedrau weldio yn hyblyg trwy'r dechnoleg olrhain gwythiennau weldio awtomatig i weldio strwythur yr awyren yn gywir.
Cynnal a chadw peiriant
- Mecanwaith bwydo gwifren. Gan gynnwys a yw'r pellter bwydo gwifren yn normal, a yw'r dwythell bwydo gwifren wedi'i difrodi, ac a oes larwm annormal; A yw llif y nwy yn normal; A yw system amddiffyn diogelwch y ffagl weldio yn normal. (Gwaherddir cau'r ffagl weldio ar gyfer gwaith amddiffyn diogelwch); A yw'r system cylchrediad dŵr yn gweithio'n normal; Profi TCP (argymhellir llunio rhaglen brawf a'i rhedeg ar ôl pob shifft)
2. Archwiliad a chynnal a chadw wythnosol
1. Sgwriwch bob echel y robot; Gwiriwch gywirdeb y TCP; Gwiriwch lefel yr olew gweddilliol. ;Gwiriwch a yw safle sero pob echel y robot yn gywir; Glanhewch yr hidlydd y tu ôl i danc dŵr y peiriant weldio.;Glanhewch yr hidlydd wrth fewnfa aer cywasgedig;Glanhewch yr amhureddau wrth ffroenell y ffagl weldio i osgoi tagu cylchrediad y dŵr; Glanhewch y mecanwaith bwydo gwifren, gan gynnwys yr olwyn bwydo gwifren, yr olwyn wasgu gwifren a'r tiwb canllaw gwifren; Gwiriwch a yw'r bwndel pibell a'r bibell gwifren canllaw wedi'u difrodi neu wedi torri. (Argymhellir tynnu'r bwndel pibell cyfan a'i lanhau ag aer cywasgedig);Gwiriwch a yw system amddiffyn diogelwch y ffagl weldio yn normal ac a yw'r botwm stopio brys allanol yn normal.